
Prototypentwicklung - Wie ein Roboter entsteht
Industrieroboter spielen heute eine nicht mehr wegzudenkende Rolle in prosperierenden Unternehmen ganz verschiedener Branchen wie dem Maschinenbau, der Kunststofftechnik oder der Medizintechnik. Wir zeigen Ihnen hier, wie auch Sie in Ihrem mittelständischen Unternehmen die Entwicklung eines solchen Roboters oder eines beliebigen anderen Produkts über einen Prototyp bis hin zur Serienproduktion mit Hilfe hochmoderner CAD-Technik geradezu revolutionieren können.
Sie werden schnell erkennen, wie Sie in kleinen separaten, doch intensiv miteinander vernetzten Schritten von einer simplen Idee – häufig einer groben Bleistiftskizze auf Papier – zu einem einsatzfähigen Prototyp eines Roboters gelangen können. Und das alles unter deutlicher Einsparung von Produktentwicklungskosten!
Der Prototyp: So sieht er später einmal aus

CAD-Modelle für alle Bauteile der einzelnen Baugruppen
Unser Robotor setzt sich aus verschiedenen Baugruppen zusammen, die zur Erfüllung der späteren Alltagsaufgaben präzise miteinander zusammenarbeiten müssen. Diese Baugruppen ihrerseits bestehen aus einer Reihe von Einzelteilen, die es separat zu modellieren gilt.
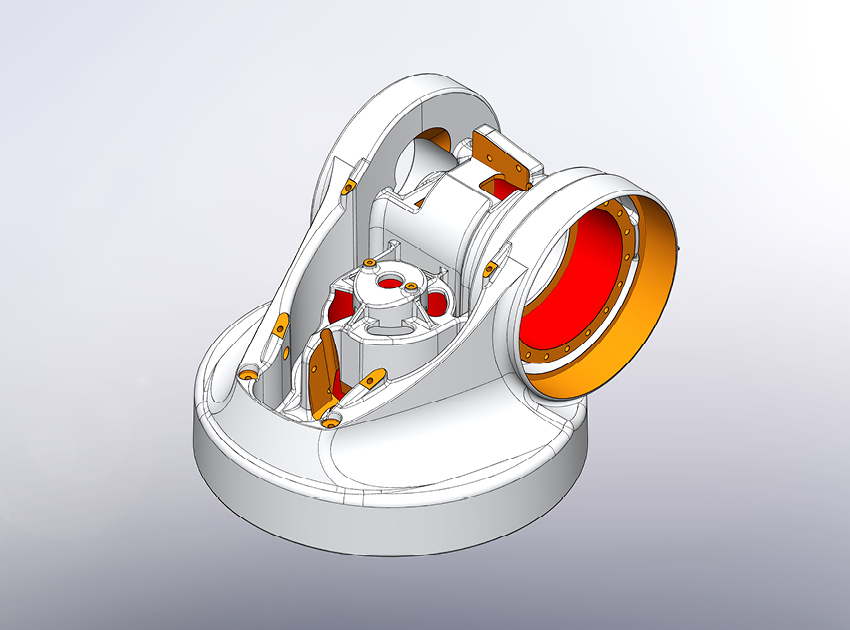
Der Grundkörper, auf dem der Roboter steht, ist die erste Baugruppe, die Drehungen um die Hochachse und Querachse ermöglicht.
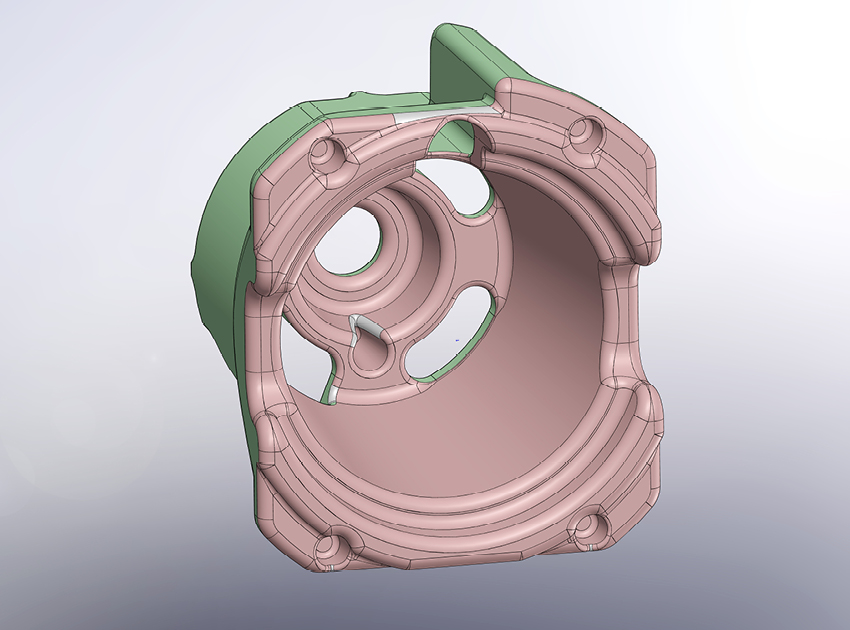
Die im Bild in unterschiedlichen Farben dargestellten Bereiche sind später mit Hilfe von CNC-Techniken in unterschiedlicher Präzision nachzuarbeiten.
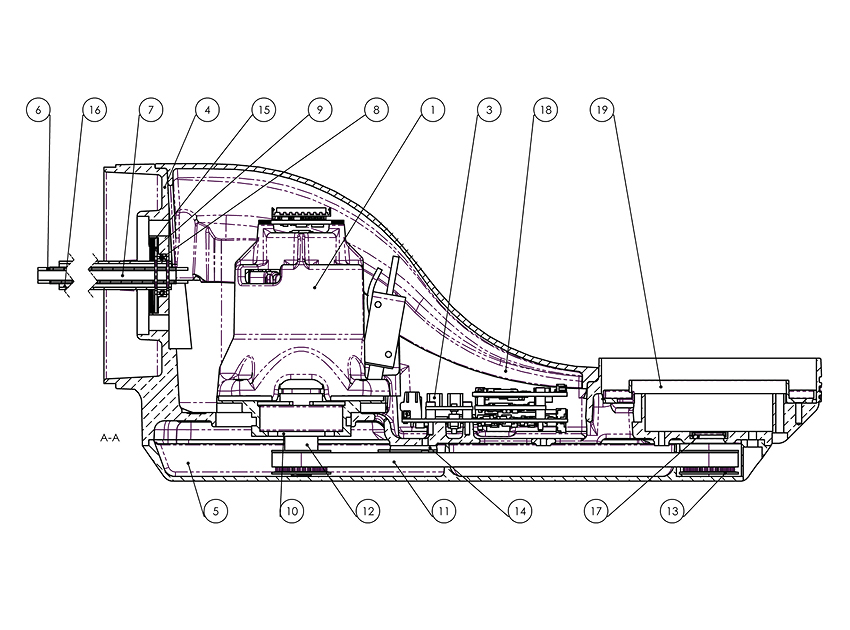
Seitenansicht und Frontansicht der Bodengruppe zeigen, wie komplex die einzelnen Teile in ihrer Ausformung sein können.
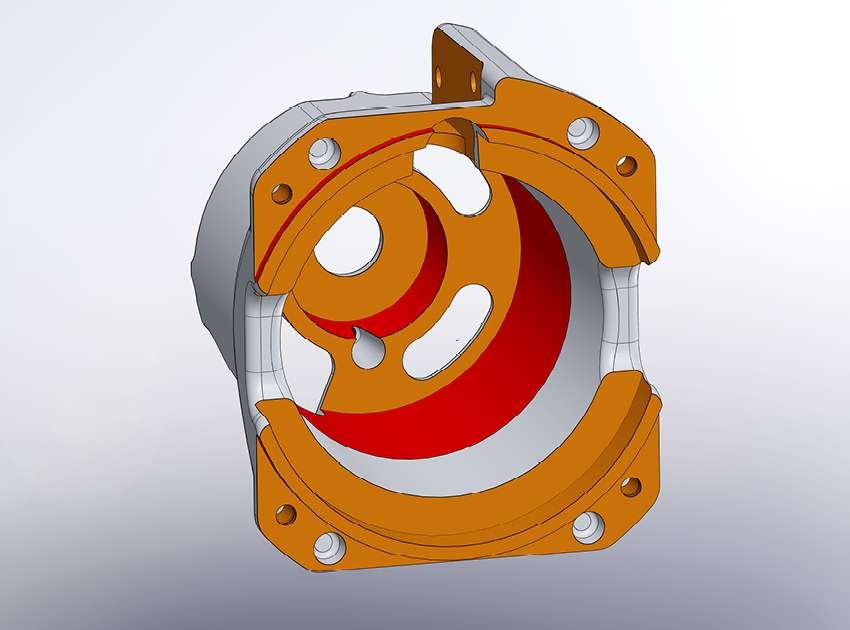
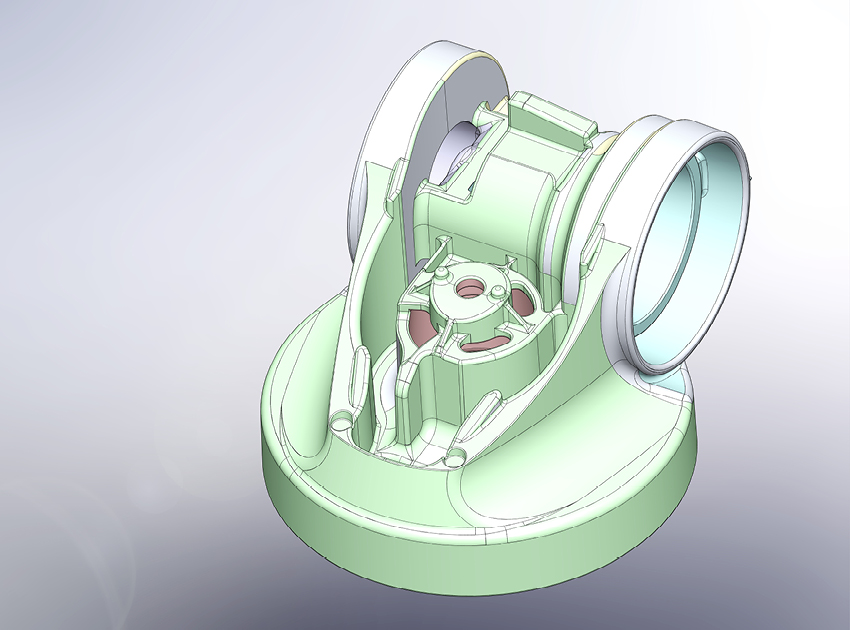
Damit sich der Roboter um all seine Achsen drehen kann, sind mehrere Elektromotoren notwendig, die alle in einem separaten Gehäuse untergebracht sind.
Hier sehen Sie ein CAD-Modell eines solchen Gehäuses für einen Elektromotor. Alle Teile des Gehäuses werden auf diese Weise konzipiert.
Das fertige Motorgehäuse sieht dann später als CAD-Modell so aus.
Der Gehäusedeckel wird so entworfen, dass er später exakt auf das Gehäuse passt. Insgesamt kann ein Roboter ohne weiteres aus über 100 Einzelteilen bestehen, die alle für sich konzipiert und in ein großes Ganzes integriert werden.
Zur Kostensenkung in der späteren Serienproduktion achten wir schon in der Planungsphase darauf, Normteile zu verwenden, wie beispielsweise Stratoren, Rotoren oder Lager des Elektromotors.
Komplexes fügt sich zusammen
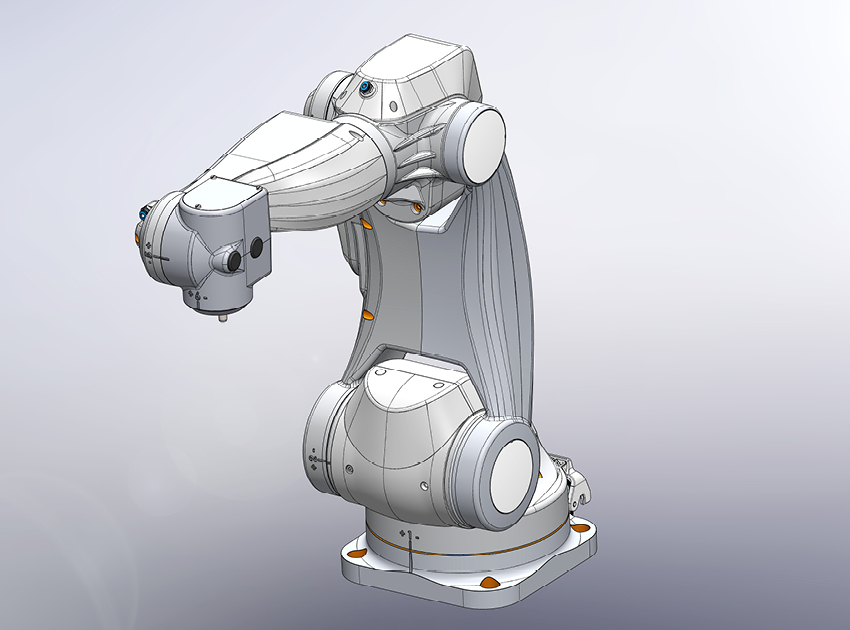
Schließlich sieht das komplette CAD-Modell des Roboters so aus.
Auf komfortable Weise lassen sich hier alle separaten Baugruppen isoliert betrachten. Sie können das Modell frei im Raum drehen, um sich eine dreidimensionale Vorstellung aller Teile zu verschaffen. Auch lassen sich die Arme in verschiedene Positionen bewegen, was hilfreich ist, um den gesamten Aktionsradius des Roboters darzustellen und erforderlichenfalls auch zu bemaßen.
Details der Darstellung kennen kaum Grenzen.
CAD-Modelle als Grundlage für Gussformen
Die von uns verwendete CAD-Software verfügt über Schnittstellen, die für nachfolgende Arbeitsschritte wie etwa den Feinguss oder den 3D-Druck geeignet sind.
Bei den Gussmodellen sind verschiedene Details zu überdenken: Wir berücksichtigen bereits in der Planungsphase Formschrägen, Planungsaufmaß, Hinterschnittanalysen oder Trennfugen.
Zeichnungen für die Fertigung und Montage
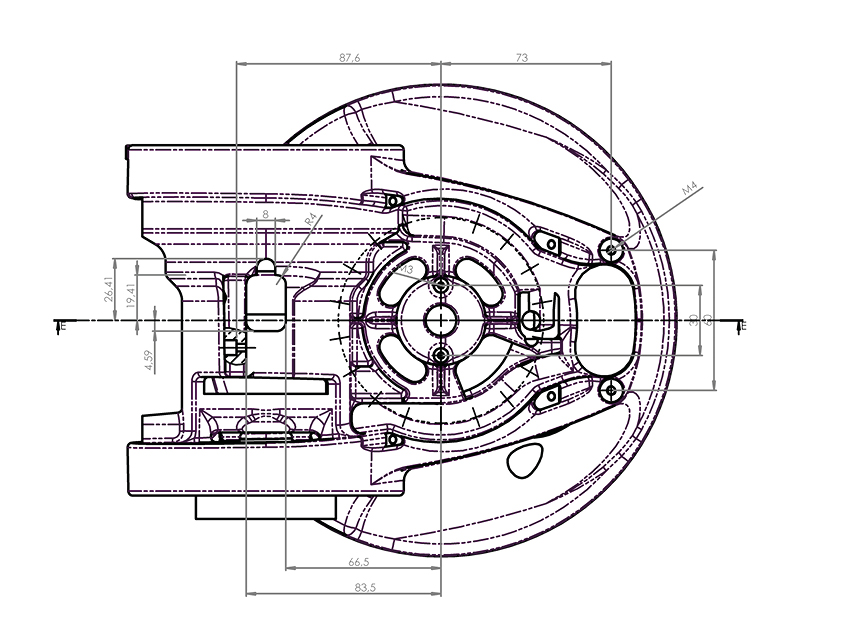
Das einzelne Bauteil des komplexen Sockels des Roboters sieht als Zeichnung so aus. Solche Zeichnungen sind für Ihre Ingenieure und Fachkräfte eine Grundvoraussetzung.
Sie erhalten detaillierte Zeichnungen für jedes Bauteil.
Am Beispiel der Baugruppe eines Robotorarms zeigen wir hier, wie detailliert die Zeichnungen erstellt werden können, so dass keine Wünsche offen bleiben.
Werden Details während der Produktentwicklung geändert, so sind wir dazu in der Lage, die Zeichnungen schnell an die neuen Erfordernisse anzupassen.
So ist Ihr Team immer auf dem neuesten Stand.
Nachbearbeitung fertig gegossener Bauteile mit CNC-Maschinen
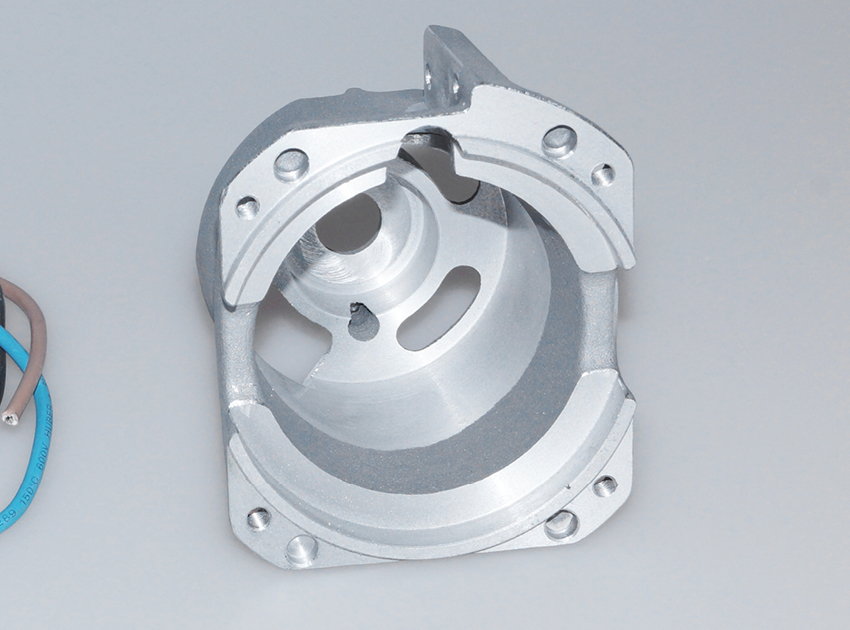
Gegossen sieht unser Motorgehäuse zum Beispiel so aus. Nach dem Guss erfolgt dann der “Feinschliff”. Bereiche des Modells, in die beispielsweise die Lager eingepasst werden, die aus Kostengründen aus Normteilen bestehen, können auf 0,01 mm passgenau nachbearbeitet werden. Bei weniger sensiblen Elementen reicht oft eine Genauigkeit von 0,1 mm.
Entwickelt sich Wärme, wie hier beim Elektromotor, können entsprechende Dehnungstoleranzen schon im Modell berücksichtigt werden.
Hier im Bild sehen Sie den Deckel eines Robotorarms vor und nach der Nachbearbeitung mit CNC-Technik.
Die im oberen Teil des Bildes erkennbaren Grate entlang der Kanten sind im fertig bearbeiteten unteren Teil entfernt. Auch ist die Oberfläche so weit vorbereitet, dass sie später zum Beispiel lackiert oder beschichtet werden kann.
Diese hier am Beispiel eines Prototyps beschriebenen Schritte ermöglichen später eine weit gehend automatisierte Serienproduktion.

Fertige Bauteile und Baugruppen werden zusammengefügt
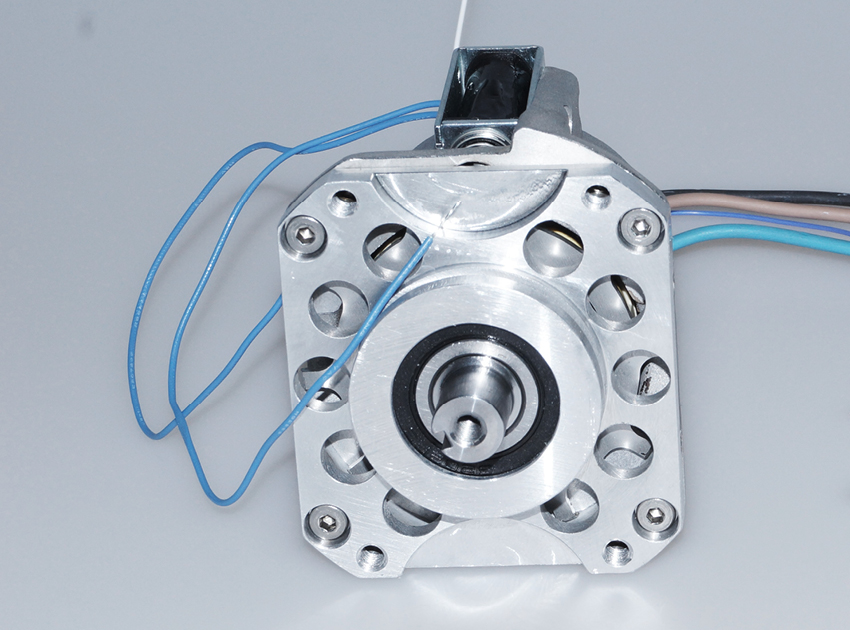
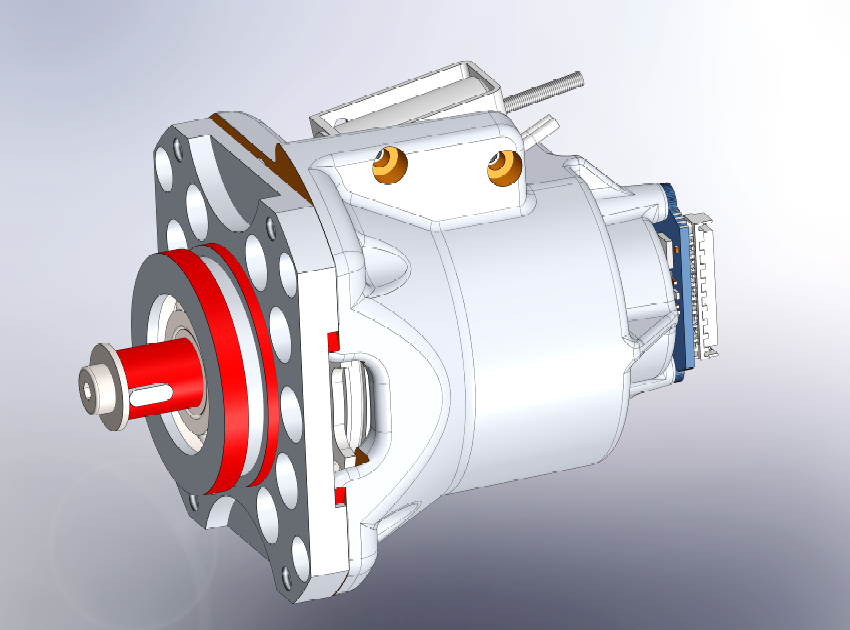
Mit eingebauten Lagern und dem Rotor sowie dem aufgesetzten Gehäusedeckel sieht die auf Passgenauigkeit gefertigte Baugruppe des kompletten Motorgehäuses so aus.
Solche Motorengehäuse sind für jede einzelne Drehachse des Roboters erforderlich. Der Anschluss an die Steuerungselektronik für alle separat anzusteuernden Motoren erfolgt über ein Bussystem.
Mit der Endmontage der einzelnen Bauteile und Baugruppen ist der Prototyp fertig. Bis zur Serienreife sind noch einige Prozessschritte zu durchlaufen, so dass ein vollumfänglich alltagstauglicher Roboter entsteht.
Sie können leicht nachvollziehen, wie wichtig hier eine intensive Zusammenarbeit zwischen Ihrer Forschungs- und Entwicklungsabteilung und uns als externem Dienstleister für die Entwickluing von CAD-Modellen ist.